概要
【太陽を逃さない!最大効率を追求する自律型発電システム】
ソーラーパネルをサーボモーターで動かし、最も電圧が高くなる角度を自動で探し出す「太陽光追尾システム」を構築します。パネルの向きによって変化する発電量を「電圧」として計測し、最適な角度を導き出す仕組みを学びましょう。
用意する物
- タコラッチ・ミニ
- サーボモーター
- 小型のソーラーパネル
- 工作材料(パネルを支える架台、段ボールなど)
準備
- 事前に『計測・制御』の教材を通して、カードの使い方や問題解決の手法を習得しておく必要があります。
活動
1. 工作
- サーボの接続: サーボモーターをタコラッチ・ミニの「デジタルA」端子に接続します。
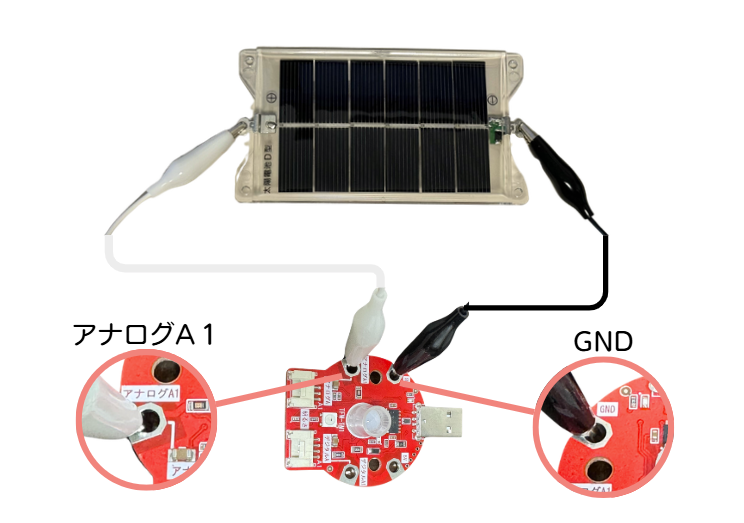
- パネルの接続: ソーラーパネルのプラス・マイナス線を、タコラッチ・ミニの「GND」ピンと「アナログA1」ピンにそれぞれ接続します。(基本:電圧をはかる参照)
- 架台の作成: サーボモーターの回転軸にパネルを取り付け、左右に動く土台を木材や段ボール、3Dプリンターなどで作ります。(参考:AI画像認識分別器と同じような架台で実験ができます。)
2. プログラミング
【使うカードの例】
- 計測 08:時間になった(時間/Scratch)
- 制御 04:角度を指定して回す(サーボモーター(オプション))
【プログラム例】
このプログラムは、時計の「分」が 0 になったタイミングでスキャンを開始し、-30度から+30度までの範囲で最も効率の良い角度を見つけ出し、そこにサーボモーターを固定する動作を繰り返します。
「最大電圧」、「ベスト角度」、「スキャン角度」を記録するための変数を作成して活用します。
-
【実行のタイミング(トリガー)】
-
条件:[現在の(分)= 0]なら
- 毎時0分(例:1時00分、2時00分...)になった瞬間に、一度だけスキャン動作を開始します。
-
条件:[現在の(分)= 0]なら
-
【スキャンの準備(初期化)】
- スキャンを始める前に、データをリセットします。
- [最大電圧]を 0 にする:これから測る値と比較するために最小値にしておきます。
- [ベスト角度]を 0 にする:記録用の変数をクリアします。
- [スキャン角度]を -30 にする:調査を開始する最初の位置(左端)を設定します。
- スキャンを始める前に、データをリセットします。
-
【スキャン動作(6回の繰り返し)】
- **[6回繰り返す]**ブロックの中で、10度ずつ角度を変えながら電圧をチェックします。
- 移動:[サーボ デジタルA(A1)]を**[スキャン角度]**にします。
- 待機:[2秒待つ](モーターが移動し、電圧が安定するのを待ちます)。
-
比較と記録:もし、今計測した[電圧]が[最大電圧]より大きいなら:
- 現在の値を新しい**[最大電圧]**として保存。
- その時の角度を**[ベスト角度]**として保存。
-
更新:[スキャン角度]を 10 ずつ変えます。
- 間隔:[1秒待つ]。
- 補足: -30度から10度ずつ6回繰り返すことで、最終的に +30度(計60度の範囲)まで調査します。
-
【最適な角度への移動】
- 6回のスキャンが終わった後、記録された**[ベスト角度]**へ[サーボ デジタルA(A1)]を動かします。これにより、その1時間の中で最も発電効率が良い向きに固定されます。
-
【待機】
- 最後に**[60秒待つ]**ことで、同じ「0分」の間にプログラムが何度も再始動してしまうのを防いでいます。

3. 動作確認
- プログラムを実行し、パネルが端から端まで動くのを確認します。
- 懐中電灯などの強い光をあてて、スキャンが終わった後に一番明るい(電圧が高い)方向を向いて止まれば成功です。
発展
- エネルギーの活用と計測の両立: ソーラーパネルの電力を「使う」回路と「測る」回路を組み合わせてみましょう。パネルにモーターや電子オルゴールなどの負荷をつなぎつつ、その両端からタコラッチ・ミニのアナログA1へ配線することで、「実際に動かしながら、どれだけのパワーが出ているか」をリアルタイムで確認できるようになります。
- スプレッドシート連携: 「通信 05:明るさを記録する(スプレッドシートに記録) +アクセス」を使い、発電量の変化を記録してみましょう。
-
AI天気連動: 「AI 03:ステージ表示されている物についてたずねる +アクセス」を使い、カメラ映像から天気を判断させます。「雨です」と判定されたら、パネルを水平にして保護する動きを追加してみましょう。
- ※画面右上のボタンでカメラモードに切り替えて使用してください。
- ※利用には、AkaDako Cloud Plus のアクセスキーが必要です。