概要
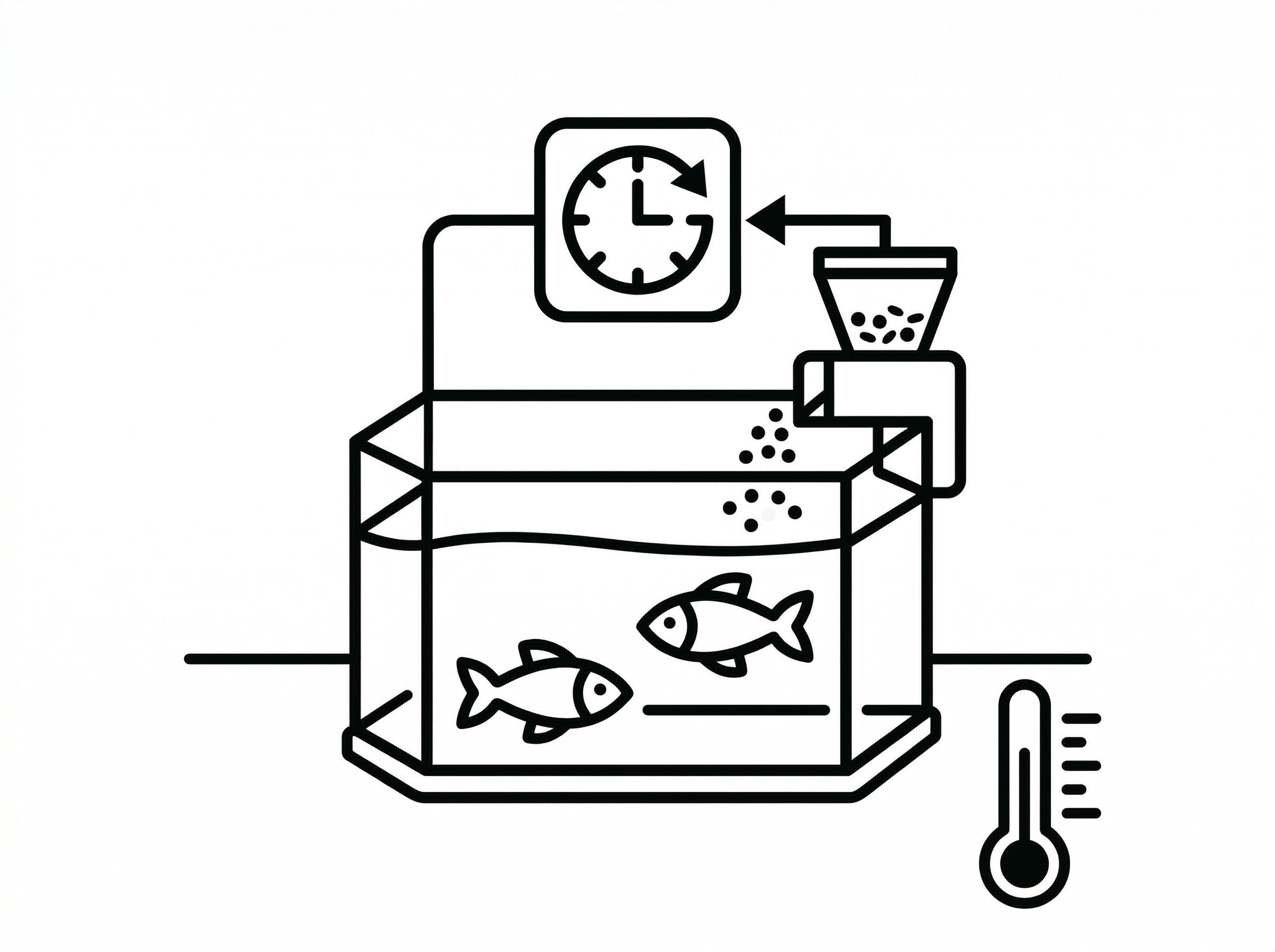
【時間になったらごはん!メダカの自動給餌(きゅうじ)機】
旅行中や忙しいときでも、メダカに決まった時間に餌をあげられるシステムです。 このシステムは、プログラムで設定した時間になると、サーボモーターが動いて餌の入った容器を傾けたり振ったりします。シンプルな仕組みですが、大切な命を守るための「計測・制御」の基本が詰まった装置です。 本活動では、水槽に見立てた箱などを使って、決まった時間に正確に動作するか実験を行いましょう。
用意する物
- タコラッチ・ミニ
- PC(1台)
- サーボモーター(オプション)
- 小さなプラスチック容器(フィルムケースや薬の空き瓶など)
- 工作用具(セロハンテープ、キリなど)
準備
- 事前に『計測・制御』の教材を通して、カードの使い方や問題解決の手法を習得しておく必要があります。
活動
1. 工作
- 餌入れ容器の作成: プラスチック容器のフタや側面に、メダカの餌が数粒ずつ出るくらいの小さな穴をあけます。
- アームの取り付け: サーボモーターの「ホーン(白いパーツ)」に、餌の容器を取り付けます。
- ポート接続: サーボモーターをタコラッチ・ミニの「デジタルA」端子に接続します。
- 設置: サーボモーターが回転したときに、容器の穴が水面(に見立てた場所)の真上に来るように固定します。
- 調整のコツ: 穴が大きすぎると餌が出すぎて水が汚れてしまいます。少しずつ出るように、テープなどで穴の大きさを調整するのがポイントです。
2. プログラミング
【使うカードの例】
- 計測 08:時間になった(時間/Scratch)
- 制御 04:角度を指定して回す(サーボモーター(オプション))
【プログラム例】
-
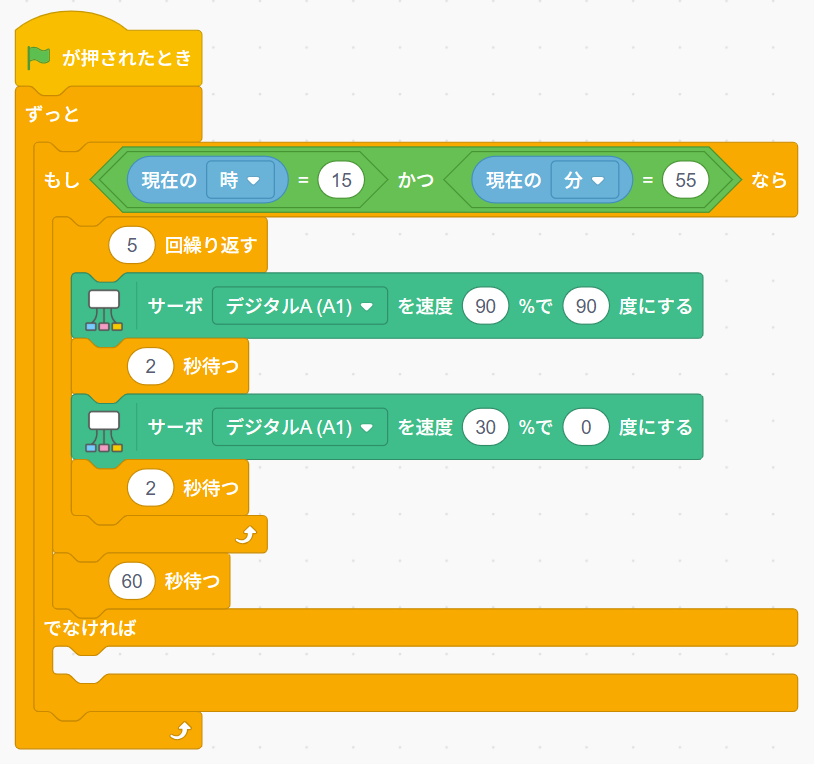
時間の判定:
[ ずっと ]ブロックの中で、現在の時刻をチェックします。 -
条件分岐の構成:
[ もし (現在の時 = 8) かつ (現在の分 = 0) なら ](朝8時になったとき)という条件を作ります。 -
給餌の動き: 条件に当てはまったら、
[ 制御 04:サーボモーターを (90) 度にする ]を実行し、少し待ってから[ (0) 度 ]に戻します。これを数回繰り返して「容器を振る」動きを作ります。 -
重複防止:
[ 60秒待つ ]を入れることで、同じ1分間のうちに何度も餌をあげすぎないようにします。 - 試行錯誤のポイント: 餌の種類や重さによって、容器を振るスピードや角度を変える必要があります。「1回でちょうど良い量が出る」ように、サーボモーターの角度や待ち時間を試行錯誤して調整してみましょう。
3. 動作確認
- 空運転テスト: 実際に餌を入れずに動かしてみて、アームがスムーズに回転するか確認します。
- 給餌テスト: 少量の餌を入れて、1回の動作で適切な量が出るか、こぼれたり詰まったりしないかテストしましょう。
発展
AIカメラ連動と環境に合わせた制御
さらに賢く、メダカに優しいシステムにするためのアイディアです。
- AIおねだり検知: 「AI 03:ステージ表示されている物についてたずねる+アクセス」を活用します。カメラで水槽を映し、生成AIに「メダカが餌を欲しがって水面に集まっていますか?」とたずねます。YESのときだけ餌をあげる、「おねだり検知機能」に挑戦してみましょう。
- 水温による判断: 「計測 10:温度が上がった/下がった(温度センサー(オプション))」をデジタルA端子に接続します。水温が低すぎてメダカが活動していないときは、餌の量を減らす(またはあげない)という高度な判断をプログラムに組み込んでみましょう。
-
条件づけの訓練: 餌をあげる瞬間に
[ 制御 01:明かりをつける ]でLEDを光らせたり、音を鳴らしたりして、メダカに「ごはんの時間だよ」と教える訓練(条件づけ)をしてみるのも面白いですよ。
※画面右上のボタンでカメラモードに切り替えて使用してください。 ※利用には、AkaDako Cloud Plus のアクセスキーが必要です。